The goal of this work is to develop a single propulsion and control concept for UUV’s that can provide more degrees of freedom and better control effectiveness compared with current technologies. The concept focuses on cyclically varying the pitch distribution of the local stator angle of attack about the body circumference in a pre-swirl propeller configuration. Through prescribing a sinusoidal variation in the stator pitch amplitude two things are accomplished:
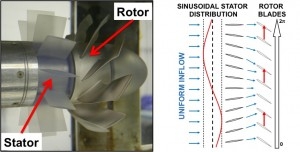
(1) A side force is generated by the stator array alone.
(2) The relative inflow observed by the propeller blades (and thus the force produced by them)changes across the propeller cycle due to the variation in the stator wakes.
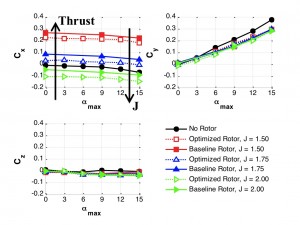
The plots show the primary force coefficients versus the amplitude of the cyclic stator pitch distribution, for three different advance ratios of the propeller.
The plots show the SPIV results in the form of the cylindrical velocity components and the in-plane vector field overlaid on the stream-wise vorticity for a wake slice downstream from the propulsor.
Conclusions:
Global force measurements and SPIV wake measurements were collected analyzed for a novel maneuvering propulsor concept, in the NUWC Research water tunnel. The stator distribution alone produces significant forces in the Y-direction. When the propeller is operating thrust is produced on the model as expected, also the Y-force produced by the stators is reduced by 20%, and a small Z-force is produced. The generation of the secondary rotor forces in the z-direction is due to circumferential variation of the inflow to the rotor. In the axial direction the flow is accelerated across the top half of the rotor disk where the rotor blades are advancing into the tangential flow set up by the cyclic stator configuration. Across the bottom half of the rotor disk the rotor blades are retreating with the tangential flow, so the axial wake is not accelerated. This gradient in the axial velocity across the rotor disk in the z- direction produces a z force and pitching moment measured on the model.